Integrity and Collaboration in Dynamic Sensor Networks (i.c.sens)

The Research Training Group 2159 “Integrity and Collaboration in Dynamic Sensor Networks” (i.c.sens) is a joint research and doctoral program at Leibniz Universität Hannover funded by the German Research Foundation (DFG).
Background
How can the trustworthiness of automated and autonomous systems (integrity) be ensured so that they do not pose a threat to humans? And how can collaboration between the different sensors of such systems be used to achieve this? The PhD students of the Research Training Group i.c.sens. are researching these problems. Since December 2016, the DFG provides the funding for the RTG for 9 years by financing 3 cohorts, each of which is comprised of 9 PhD positions and one postdoctoral position.
Research Focus of the RTG
The main focus of the RTG is the development of methodological foundations and the provision of integrity and collaboration concepts for dynamic sensor networks in connection with digital maps. The emphasis is on navigation information. The results will be made available as a cross-application “construction kit collaborative integrity”.
The Research Training Group investigates concepts for ensuring the integrity of collaborative systems in dynamic sensor networks. The starting point is the observation that collaborative and autonomous systems are finding their way into many areas of (working) life: from flexible factory automation to service and household robotics to autonomous vehicles. This means that the systems no longer move shielded from people, but in their direct environment or even in direct interaction with them, which represents a great danger potential. The key to controlling this lies in the integrity of the technical systems, i.e. the timely detection of errors and warning of the environment.
The coexistence of an increasing number of autonomous systems opens up the possibility - and necessity - of coordination. Instead of combining simple sensor signals in a single central control unit, decentralized systems collaborate, and instead of a self-sufficient mode of operation, external information, from other sensor systems or previous knowledge of the environment, is incorporated.
From this the two main topics of the research group are deduced: concepts for the integrity of technical systems and the investigation of collaboration between decentralized systems in the form of dynamic sensor networks, i.e. a group of communicating, moving systems equipped with sensors, such as autonomous vehicles.
The research group concentrates on the determination of the state of dynamic sensor networks, which is understood here as the determination of kinematic quantities, essentially position, velocity, acceleration and position information, as well as of latent variables, such as the internal map representation for the provision of environmental information. Three components can be identified for this question:
- The observations gained by sensors, which describe the input variables at certain points in time,
- the methodology interpreting these observations using models and, at the same time, updating these models based on the observations, and
- the map, a (temporally variable) model of the environment, representing the current state of knowledge of the system about its environment. The term map will be used in the following in this sense - i.e. as a comprehensive term for a representation of spatial facts and not in the narrow sense of an analogous topographic map.

The Second Cohort
I joined the second cohort of i.c.sens in 2020 at one of the participated institutions Institue of Geodesy (IfE). There are 9 PhD topics in the second cohort:
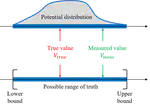
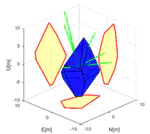
- Bounding and Propagating Uncertainty with Interval Mathematics
- Detection and collaborative tracking considering UAV based Aerial Images
- Combining Probabilistic and Interval-based Error Models for Sensor Fusion on Mobile Robots
- Validation and Quality Assurance Concepts for Collaborative Multi-Sensor-Systems
- Collaborative Positioning Using Imaging Sensors
- Integrity Contained Navigation Based on Vehicle Data and Constrained Collaborative Information
- Integrity Measures for Hierarchical and Incremental Map Data Acquisition
- Collaborative Navigation for Smart Cities
- Localization and Mapping Using Maximum Consensus
Publications
A list of publications of the RTG can be found >>here«
Jingyao Su
Doctoral researcher of GNSS navigation
My research interests include GNSS navigation, integrity monitoring and uncertainty modeling with interval mathematics.